
เปิดโลกโปรเกรสซีฟตอนที่ 4
ตอน หลักพื้นฐานในการออกแบบเลนส์โปรเกรสซีฟ
Darry Meister, ABOM -เขียน
Somyot Phengtavee, O.D. - แปลและเรียบเรียง
บทความในวันนี้เป็นเรื่องราวของพื้นฐานการออกแบบเลนส์โปรเกรสซีฟ ซึ่งผมนั่งอ่านของ Dr.Darry Meister ที่เขียนเอาไว้ ซึ่งแกเขียนได้ดีมาก และผมก็พยายามที่จะแปลโดยคงเนื้อหาของแกไว้ให้ครบถ้วนที่สุดและพยายามจะไม่ใส่ความคิดส่วนตัวลงไป เพียงแต่เรียบเรียงถ้อยคำหรือเนื้อหาให้เป็นรูปแบบของภาษาไทย ให้คนทั่วไปสามารถอ่านได้ง่าย เมื่อท่านอ่านจบเรื่องสั้นเรื่องนี้ ท่านจะเข้าใจพื้นฐานของความเป็นโปรเกรสซีฟมากขึ้น และยอมรับในแบบที่มันเป็นได้มากขึ้น ที่ต้องพูดเนื่องจากว่า ผู้บริโภคมักจะเข้าใจว่า เลนส์แพงๆนั้นโครงสร้างมันจะกว้างอย่างนู้นอย่างนี้ แต่เมื่อใช้งานจริง มันอาจจะไม่เป็นเหมือนที่เซลล์พยายามเชียร์ขาย ทำให้น้อยอกน้อยใจ หรือคิดไปเองว่า หลังจากจ่ายเลนส์ที่เขาว่าแพงที่สุดในร้านแล้ว คิดว่าจะสามารถตอบโจทก์ทุกสารพัดกิจกรรม เช่นยังไงเสียการใช้งานเลนส์โปรเกรสซีฟก็จะต้องเงยหน้าทำงานหน้าคอมพิวเตอร์ เว้นแต่คุณเอาหน้าจอลงต่ำ ซึ่งบทความนี้จะทำให้ท่านเข้าใจข้อดี ข้อบกพร่องของมัน และโปรเกรสซีฟก็คือ เลนส์อเนกประสงค์ชนิดหนึ่ง ซึ่งมีขีดจำกัดทั้งทางด้านคณิตศาสตร์และฟิกสิกส์ แต่จุดด้วยเล็กๆเหล่านั้น ถ้าเปิดใจมันจะเป็นปัญหาเพียงเล็กน้อย ไม่ได้เลวร้ายอะไร เมื่อเทียบกับคุณประโยชน์ที่มีให้ และส่วนตัวผมเชื่อว่าไม่มีใครบนโลกนี้ที่ไม่สามารถใส่เลนส์โปรเกรสซีฟได้ และเลนส์สมัยนี้ทุกคนสามารถปรับตัวได้ใน 1-3 วัน เอาหล่ะเรามาเริ่มกัน
ลักษณะผิวของเลนส์โปรเกรสซีฟ (Progressive Lens Surface)
เลนส์โปรเกรสซีฟ มีชื่อเต็มเป็นภาษาอังกฤษว่า “Progressive Additional Lens” ย่อว่า “PALs” ซึ่งว่าเป็นเลนส์โฟกัสหลายระยะชนิดหนึ่ง (Multifocal lens) ซึ่งมีความพิเศษคือ “มีความสามารถในการโฟกัสได้หลายระยะแต่ไร้รอยแต่” โดยการออกแบบพื้นผิวเลนส์ให้มีการเปลี่ยนแปลงความโค้งแบบต่อเนื่องจากตำแหน่งมองไกล (โค้งน้อยๆ) ลงไปเรื่อยๆแบบค่อยเป็นค่อยไป (Gradiant) ตามแนวของคอริดอร์ไปสิ้นสุดที่ตำแหน่งดูใกล้ (โค้งมากสุด) และค่าความโค้งที่เพิ่มขึ้นทั้งหมดจะเท่ากับค่า Addition พอดี และด้วยการไล่ค่าความโค้งแบบ Gradiant เช่นนี้ทำให้ได้ค่าสายตาที่ Varies จึงทำให้เลนส์โปรเกรสซีฟนั้นได้ระยะสำหรับใช้งานในระยะกลางมาด้วย ซึ่งเป็นระยะที่ไม่สามารถได้รับจากเลนส์สองชั้นทั่วไป
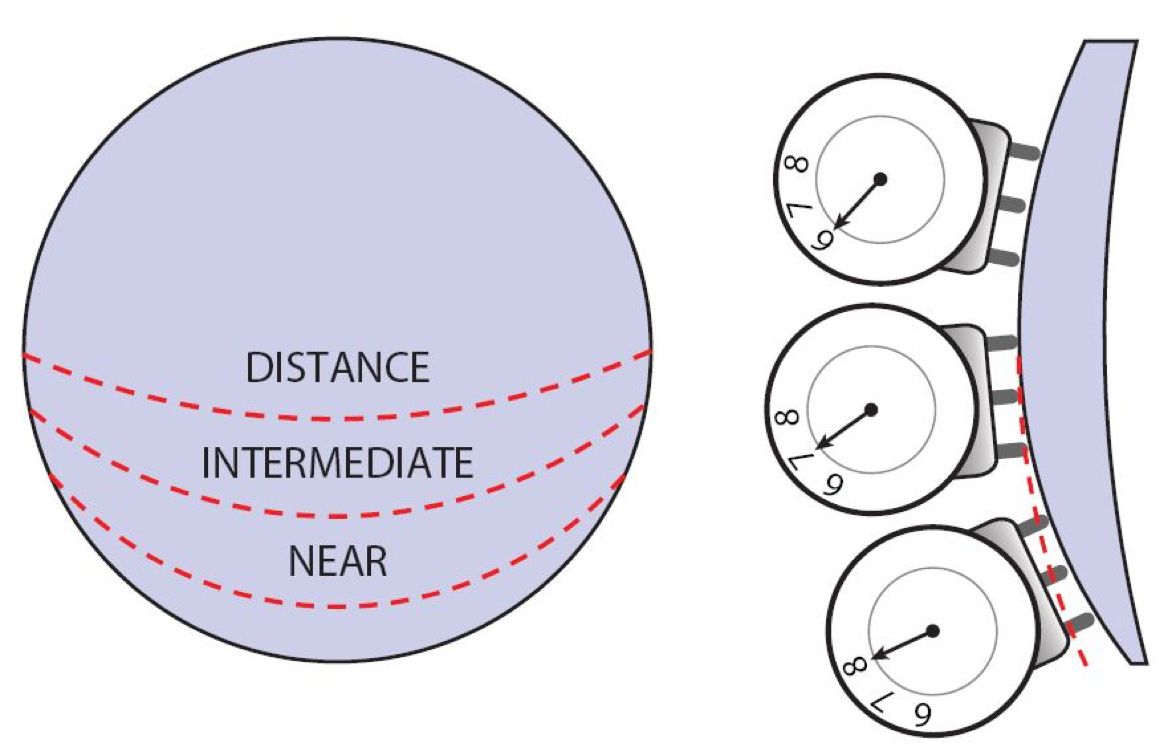
Figure 1 : แสดงพื้นผิวโครสร้างโปรเกรสซีฟที่มีการไล่ค่าความโค้งแบบ Smooth gradiant จากจุดมองไกลลงมายังตำแหน่งดูใกล้ และเกิดสนามภาพสำหรับใช้งานทั้ง 3 ระยะโดยไม่มีรอยต่อ แต่เราสามารถตรวจจับการเปลี่ยนแปลงความโค้งได้ด้วยด้วยนาฬิกาวัดโค้ง (Lens clock) ถ้ามีการเปลี่ยนแปลงความโค้งอยู่ทางผิวหน้าเลนส์จะเป็น Front progressive lens, แต่ถ้าผิวหน้ามีความโค้งคงที่แต่มีการเปลี่ยนแปลงที่ผิวหลังแสดงว่าเป็นดีไซน์แบบ Back side progressive
ดังนั้น เลนส์โปรเกรสซีฟมีความพิเศษ คือ สามารถให้ค่า Addition power โดยไม่มีรอยต่อ ไม่มีรอยแยก และไม่มีเส้นแบ่งระยะสำหรับการใช้งานในแต่ละระยะ (ซึ่งพบได้ทั่วไปในเลนส์สองชั้น (Bi-focal) หรือสามชั้น (Tri-focal) และด้วยการออกแบบพื้นผิวที่เรียบไร้รอยต่อเชื่อมทั้ง 3 โซนไกลกลางใกล้เช่นนี้ มีข้อดีสำคัญอีกอย่างหนึ่ง คือ ทำให้ผู้สวมใส่เลนส์โปรเกรสซีฟนั้นไม่รับรู้ถึงภาพกระโดด หรือ Image jump จาก Prism ที่ถูก Induce ค่าสายตามองไกล มองใกล้ที่ต่างกันมาก และสามารถแก้ปัญหาเรื่องกำลังขยายที่เกิดจากค่ากำลังหักเหของสายตาที่ต่างกันมาก ซึ่งปัญหาข้างต้นนี้พบมากในเลนส์ 2 ชั้น ตัวอย่างที่เห็นได้ชัด คือ ใส่เลนส์ 2 ชั้นแล้วเดินขึ้นลงบันได ผู้ใส่จะเห็นบันไดยกตัวขึ้นมาเมื่อละสายตาจากเลนส์สำหรับมองไกลมามองผ่านเลนส์สำหรับมองใกล้ แต่ปัญหานี้ไม่พบในเลนส์โปรเกรสซีฟ
เทคนิคในการหลอมรวมเลนส์ไม่ให้มีรอยต่อในเลนส์โปรเกรสซีฟ
เนื่องจากเลนส์โปรสซีฟนั้น ใช้การเปลี่ยนแปลงค่าความโค้ง จากจุดมองไกลมาจุดมองใกล้ เมื่อความโค้งเกิดการ Varies curve ก็จะทำให้เกิดการ Varies power ได้เช่นกัน แต่การออกแบบลักษณะนี้ โดยหลักการแล้วจะเกิดชั้นเป็นสเตปเล็กๆ เกิดขึ้นที่บริเวณด้านข้างของเลนส์หลายๆชั้นที่เอามาต่อกัน ซึ่งต้องใช้เทคนิคพิเศษในการหลอมรวมชั้นนั้น โดยการขัดโครงสร้างเลนส์กำลังเอียงบวก (Plus cylinder power) เข้าไปในแนวเฉียง (Oblique axis) ที่บริเวณด้านข้างของเลนส์โปรเกรสซีฟ ซึ่งการวาง Plus cylinder เข้าไปแบบนี้จะทำให้สามารถหลอมรวมรอยชั้นเล็กๆที่เกิดระหว่างชั้นจากมองไกลมายังตำแหน่งอ่านหนังสือได้อย่างสนิท แบบไม่มีรอย (ดูรูปล่างประกอบ)
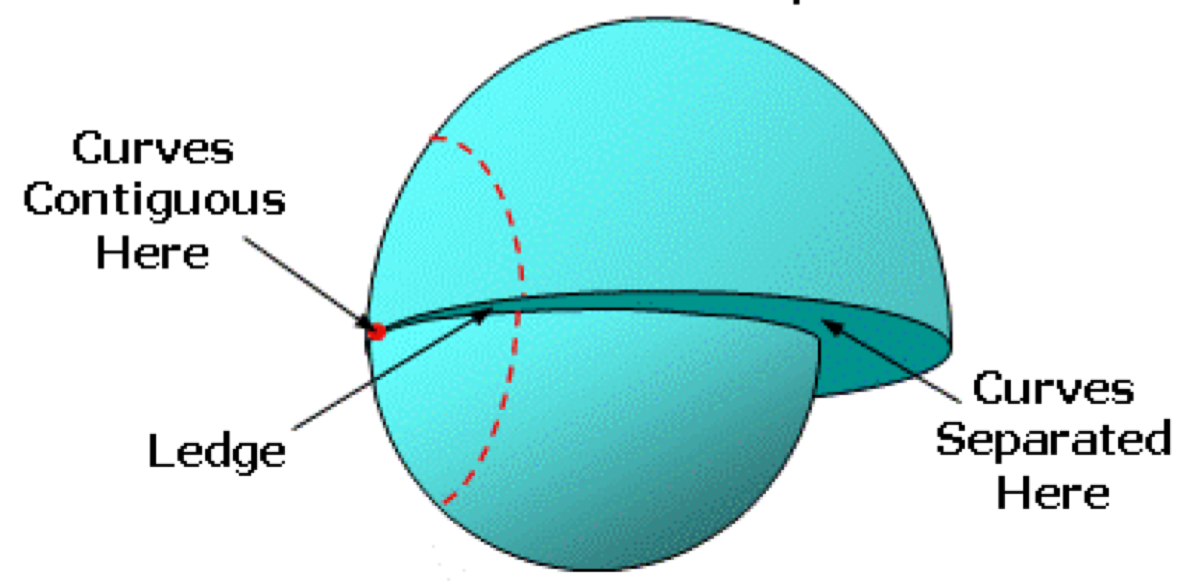

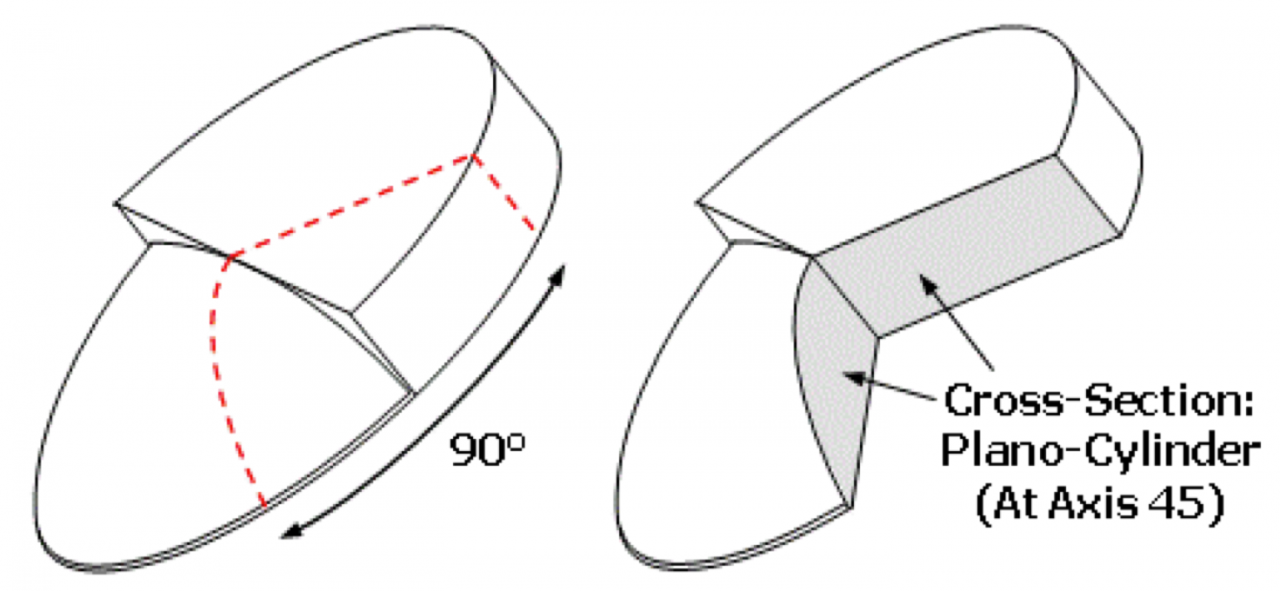


Figure 2 : เมื่อนำเลนส์ที่มีความโค้งต่างกันมาต่อกันจะทำให้เกิดรอยแยกของชั้นบริเวณรอยต่อ ซึ่งเราสามารถผสานหรือหลอมให้เนื้อเลนส์ส่วนบนและส่วนล่างให้เชื่อมกันได้โดยการใช้ Plus cylinder power ซึ่งในรูปเป็นตัวอย่างการตัดเอาเนื้อเลนส์ส่วนที่ต้องการจะนำมาประสานออกเป็นมุม 90 องศา และแทนที่ช่องว่างนั้นด้วย Plus cylinder ก็จะสามารถทำให้เลนส์ส่วนบนและส่วนล่างสามารถเชื่อมกันได้สนิท
แต่พื้นผิวจริงของเลนส์โปรเกรสซีฟนั้นซับซ้อนกว่าตัวอย่างในรูปมากนัก เนื่องจากในรูปนั้นเป็นตัวอย่างการหลอมรวมของเลนส์สายตามองไกลกกับมองใกล้เพียง 2 ค่าสายตา แต่เลนส์โปรเกรสซีฟนั้น มีการเปลี่ยนแปลงค่ากำลังหักเหแบบ Gradient คือ ค่อยๆไล่ละเอียดทีละน้อยจนไม่สามารถเห็นการเปลี่ยนแปลงหรือรอยต่อ ทำให้ในการหลอมรอยต่อโดยใส่ Unwanted cylinder เข้าไปนั้นจะต้องใส่ไปทีละน้อยให้ Varies ตามค่าสายตาที่เปลี่ยนแปลงด้วย แต่อย่างน้อยรูปข้างต้นก็พอให้เข้าใจคอนเซปต์ของการออกแบบเลนส์โปรเกรซีฟและจากการออกแบบเลนส์เช่นนี้ เป็นคำตอบให้เราว่า อะไรคือสาเหตุที่ทำให้เลนส์โปรเกรสจำเป็นต้องมีภาพบิดเบี้ยวด้านข้างและไม่ว่าจะใช้เทคโลโลยีสูงขนาดไหน ภาพบิดเบี้ยวยังคงจำเป็นต้องมีและไม่สามารถหลีกเลี่ยงได้ แต่จะบิดเบี้ยวมากน้อย โครงสร้างแคบหรือกว้างนั้นก็มีตัวแปรมากมายที่เป็นตัวควบคุม
เลนส์โปรเกรสซีฟ ชนิด อเนกประสงค์ นั้นมีโครงสร้างสำคัญอยู่ 4 โซน คือ
1. Distant zone : เป็นโซนสำหรับมองไกล เป็นโซนที่มีความเสถียรภาพของโครงสร้างที่สุด คือ เป็นโซนที่ไม่มีการเปลี่ยนเปลี่ยนแปลงค่าความโค้งหรือสายตา เป็นโซนที่ออกแบบสำหรับไว้มองไกลโดยเฉพาะ ซึ่งถูกวางอยู่ที่พื้นที่บนสุดของตัวเลนส์โปรเกรสซีฟ
2. Near zone : เป็นโซนสำหรับดูใกล้หรืออ่านหนังสือ ซึ่งเป็นโซนที่มีความเสถียรภาพของโครงสร้างเช่นเดียวกัน คือ ไม่มีการเปลี่ยนเปลี่ยนแปลงค่าความโค้งหรือสายตา เป็นโซนที่ออกแบบสำหรับอ่านหนังสือ ซึ่งถูกวางอยู่ที่พื้นที่ล่างสุดของตัวเลนส์โปรเกรสซีฟ
3. Progressive Corridor : เป็นโซนที่มีการเปลี่ยนแปลงค่าความโค้ง (เปลี่ยนแปลงสายตา) ซึ่งเชื่อมระหว่าง Distant zone และ Near zone ซึ่งการมีคอริดอร์ ทำให้เลนส์โปรเกรสซีฟสามารถใช้งานในระยะกลางได้ และจุดที่คมชัดที่สุดจะอยู่ในแนวดิ่งตามแนวคอริดอร์ เรียกว่า Central viewing zone
4. Blending Region : พื้นที่การหลอมรวม เนื่องจากเลนส์โปรเกรสซีฟมีหลายความโค้ง มีการเชื่อมรอยต่อระหว่างโค้ง นั้นใช้ (Unprescribed) Plus cylinder เข้าไปในแนว Obliuqe ที่ได้กล่าวมาข้างต้น ทำให้เกิดการหลอมรวมของรอยต่อ (Blending region) ซึ่งจะอยู่บริเวณด้านข้างของโครงสร้างโปรเกรสซีฟ เกิดเป็นพื้นที่ที่มีภาพบิดเบี้ยวจาก Unwanted oblique cylinder ที่ใส่เข้าไป เพื่อให้ได้ Cosmetic


Figure 4 : เป็นรูปที่แสดงโครงสร้างเลนส์โปรเกรสซีฟชนิดอเนกประสงค์ (Universal progressive lens) ซึ่งแสดงพื้นที่ใช้งานต่างๆ ได้แก่ สนามภาพมองไกล (สีเขียว), สนามภาพระยะกลาง (สีส้ม), สนามภาพอ่านหนังสือ (สีเหลือง) และพื้นที่บิดเบี้ยวด้านข้างที่เกิดจากการหลอมไม่ให้เกิดรอยต่อ (สีม่วง)
บุคคลิกของเลนส์โปรเกรสซีฟ (Characterizing Progressive Optics)
ผิวเลนส์โปรเกรสซีฟนั้น จะมีโครงสร้างเป็นผิว Spheric ที่บริเวณ Central viewing zone ตามแนวของคอริดอร์ ซึ่งเป็นแนวที่ให้ภาพที่คมชัดที่สุด และจะเริ่มมี Unwanted cylinder เพิ่มขึ้นในแนวด้านข้างจากแนวศูนย์กลางการมองตามแนวที่มีการเปลี่ยนค่าความโค้ง (Progressive zone) ซึ่ง Cylinder ที่เกิดขึ้นนี้แสดงให้เห็นว่ามีการเปลี่ยนแปลงค่าความโค้ง (Varied curvature) จากจุดหนึ่งไปยังจุดหนึ่ง จากตำแหน่งมองไกลไปยังตำแหน่งอ่านหนังสือ
ค่า Unwanted cylinder ที่เกิดขึ้นแต่ละจุดบนตัวเลนส์นั้น ทำให้มีสายตาเอียงที่ไม่ต้องการเกิดขึ้นมา เรียกว่า Surface Astigmatism ซึ่งการหักเหของเลนส์ Cylinder นั้นทำให้เกิดการโฟกัสแบบสายตาเอียง (Astigmatic focus) แทนที่จะโฟกัสเป็นจุด (Point focus) จึงทำให้เกิดพื้นที่เบี้ยวและมัวที่บริเวณด้านข้างของเลนส์
Surface Astigmatism แต่จุดบนตัวเลนส์นั้นไม่เหมือนกัน โดยสนามภาพคมชัดสำหรับใช้งานในแนว Progressive corridor นั้นจะไม่มี Surface astigmatism อยู่เลย แต่จะเริ่มมีและเพิ่มมากขึ้นที่พื้นที่ด้านข้างจากการใส่ Unwanted plus cylinder เข้าไปเพื่อหลอมรวมให้เลนส์โปรเกรสซีฟนั้นไร้รอยต่อ ซึ่ง Surface astigmatism ทำให้เลนส์โปรเกรสซีฟมีบางพื้นที่สามารถใช้งานได้ บางพื้นที่ไม่สามารถใช้งานได้ และมีอาการไม่พึงประสงค์จาก Unwanted cylinder power คีือ มัว (Blur) เห็นภาพบิดเบี้ยว (Distortion) เวลาเดินโคลงเคลงเหมือนอยู่บนเรือ (Image swim)
การประเมินประสิทธิภาพของเลนส์โปรเกรสซีฟ
โครงสร้างเลนส์โปรเกรสซีฟนั้นเป็นโครงสร้างที่เกิดจากการใช้สายตาเอียงเล็กๆ (Small cylinder) ขัดเข้าไปที่ผิวเลนส์เพื่อให้เกิดโครงสร้างที่มีการเปลี่ยนแปลงค่า Addition และทำให้เลนส์เรียบเป็นเนื้อเดียวกันโดยไม่มีรอยต่อ ว่ากันง่ายๆ ก็คือ “โครงสร้างโปรเกรสซีฟนั้นถูกวาดขึ้นจากเส้นสายของเลนส์สายตาเอียง” พูดอีกนัยหนึ่งก็คือเป็นเลนส์ที่มีสายตาเอียงเป็นพื้นฐาน
ดังนั้น เราสามารถประเมินประสิทธิภาพเลนส์โปรเกรสซีฟจากการดู Unwanted cylinder ที่เกิดขึ้นแต่ละจุดที่เกิดขึ้นบนตัวเลนส์ว่ามีมากน้อยแค่ไหน หรือมีอัตราการเพิ่มขึ้นในแนวด้านข้างจากสนามภาพคมชัดไปยังบริเวณรอบข้างเป็นอย่างไร ซึ่งก็เป็นวิธีหนึ่งที่ใช้ในการประเมินประสิทธิภาพของเลนส์โปรเกรสซีฟรุ่นนั้นๆ ซึ่งการวัดค่ากำลังของเลนส์ในแต่ละจุดเพื่อดู Unwanted cylinder ที่เกิดขึ้นบนโครงสร้างนั้น คล้ายกับการทำแผนที่ภูมิศาสตร์บนผิวเลนส์ (Topographic map) ทำให้เรารู้การกระจายตัวและการยกตัวของ Unwnated cylinder และเรียกการทำ Mapping แบบนี้ว่า Conture plot ซึ่งจะบอกเราได้ว่า มีตำแหน่งไหนบนตัวเลนส์ที่เบลอมากเบลอน้อย ตรงไหนที่เกิดภาพวูบวาบ หรือมีบิดเบี้ยวที่ตรงไหน มีสนามภาพใช้งานที่ระยะใช้งาน ไกล กลาง ใกล้ที่ตำแหน่งไหน กว้างหรือแคบแค่ไหน เป็นต้น ตามรูปล่าง

Figure 4 : เป็น Contour plot ของ Unwanted astigmatism (รูปซ้าย) ซึ่งเป็นการ map เพื่อให้เห็นการกระจายตัวของของแนว Unwanted cylinder ที่ใส่เข้าไปเพื่อสลายรอยต่อ ทำให้เราเห็นการเพิ่มขึ้นของ Unwanted cylinder ในแนวด้านข้าง, ส่วนรูปขวา เป็นการประเมินคุณภาพเลนส์จากค่า Mean add power plot เพื่อให้เห็นการกระจายตัวของค่าแอดดิชั่น ณ ตำแหน่งต่างๆ
ถ้าจะว่ากันไปแล้ว เลนส์โปรเกรสซีฟแต่ละรุ่น หรือแต่ละผู้ผลิตนั้นจะมีลักษณะ หรือรูปแบบของ Conture plot ที่มีเอกลักษณ์เฉพาะรุ่นนั้นๆ ดังนั้น Conture plot นั้นเป็นเหมือนกับ “ลายนิ้วมือ” ของการออกแบบเลนส์ในแต่ละรุ่นหรือแต่ละแบรนด์

Figure 5 : การทำ Contour plot นั้นมีความคล้ายคลึงกับการทำ Topographic map เพื่อแสดงความสูงต่ำของภูมิประเทศ ทำให้เราเห็นความลาดชันบนพื้นที่ 2 มิติได้
การประเมินคุณภาพเลนส์จาก Conture plot รูปแบบหนึ่งที่นิยมก็คือการดู “ค่า Mean power ซึ่งเป็นค่าแอดดิชั่นเฉลี่ยจากการทำ Spherical Equivalent ตามแนวที่มีการเพิ่มขึ้นของค่า Addition” ซึ่งจะทำให้เรารู้ว่าเลนส์โปรเกรสซีฟแต่ละรุ่นนั้นมีการกระจาย Addition อย่างไร มีช่วงกว้างหรือแคบที่บริเวณไหนรวมไปถึงตำแหน่งอื่นๆบนตัวเลนส์ว่าแต่ละตำแหน่งนั้นเอาไว้มองที่ระยะไหน (รูปที่ 4 ขวามือ)
อย่างไรก็ตาม แม้ว่า Surface astigmatism และ Mean add power นั้น จะสามารถเป็นตัวที่ใช้บอกคุณภาพของเลนส์ แต่ทั้งสองอย่างนี้บอกไม่ได้ว่า เมื่อนำเอา 2 ปัจจัยมารวมกัน (Combind interaction) กันแล้วจะส่งผลต่อการมองเห็นอย่างไรบ้าง ดังนั้น การดูเพียง Contour plot จาก Unwanted cylinder และ Mean add power ไม่ค่อยมีประโยชน์ในการนำไปใช้ทางคลิินิกเท่าไหร่
RMS หรือ Root mean square คือ การคำนวณรวมเอาทั้ง Unwanted astigmatism กับ Mean add power มารวมกัน แล้วคิดเป็นค่าสายตาเดียวที่จุดนั้นๆบนตำแหน่งโปรเกรสซีฟว่าให้ความคมชัดอยู่ที่เท่าไหร่ ดังนั้น RMS สามารถใช้ในการประเมินประสิทธิภาพเลนส์ในทางคลินิกมากกว่าและมีประโยชน์ในการนำไปทำนายตำแหน่งที่มัวและความคมชัดของเลนส์โปรเกรซีฟแต่ละตัวได้ (ศึกษาเรื่อง RMS เพิ่มเติมได้ที่ิลิ้ง http://commons.pacificu.edu/cgi/viewcontent.cgi?article=1000&context=opt)
อีกวิธีหนึ่งที่ใช้ประเมินประสิทธิภาพของตัวเลนส์โปรเกรสซีฟ แต่ไม่ค่อยนิยม คือ Wave front analysis โดยใช้ Wave front ในการวิเคราะห์ ความคลาดเลื่อนในระดับละเอียด (Higher order abberation เช่น Spherical aberration, Coma และดู Unwanted cylinder และ Mean add power ซึ่งเป็นความคลาดเคลื่อนในระดับหยาบ (Lower order abberration) ซึ่งการวิเคราะห์โครงสร้างโดยอาศัย Wavefront analysis นั้นจะแสดงออกมาในรูปแบบของ Zernike series ซึ่งเป็น Series ที่เกิดจากการคำนวณทางคณิตศาสตร์ ซึ่งสามารถแสดงปริมาณของ Mean power, Astigamtism, Coma และอื่นๆ ซึ่งปัจจุบันการประเมินโครงสร้างด้วยวิธีนี้ เครื่องวัดกำลังเลนส์สมัยนี้สามารถวัดได้แล้ว
แต่การทำ Contour plot ของ Surface astigmmatism และ Mean power นั้นเป็นเพียงวิธีหรือเป็นหนทางหนึ่งที่พยายามจะทำให้โครงสร้างโปรเกรสซีฟที่มองไม่เห็นด้วยตาเปล่า เหมือนเรื่อง “นามธรรม” มาแสดงในรูปแบบที่มองเห็นจับต้องได้แบบ "รูปธรรม" เพื่อใช้ในการที่จะพรีเซนต์ว่า พื้นผิวของโครงสร้างโปรเกรสซีฟนั้นๆ มีลักษณะอย่างไร ซึ่งเป็นการแสดงประสิทธิภาพทางกายภาพของเลนส์บนสภาพแวดล้อมหนึ่ง และไม่มีความหมายอะไรในการนำไปใช้ในทางคลินิก แต่ Contour plot ที่ดูจะมีประโยชน์ในทางคลินิกจริงๆ คือ การทำ Contour plot แบบ Ray-traced optical performance ซึ่งเกิดจากการ Plot จากการใช้ Eye-lens model คำนวณเข้าไปในระบบว่า เมื่อมีการใช้งานเลนส์จริง Optic ที่เกิดขึ้นจริงจะเป็นอย่างไร ซึ่งเป็นเรื่องที่ละเอียดอ่อนกว่ามาก และมีปัจจัยมากมาย ที่ส่งผลกระทบต่อสายตาที่มองผ่านโครงสร้างเลนส์
ดังนั้น การใช้เครื่อง Wavefront มาตรวจจับพื้นผิวโครงสร้างโปรเกรสซีฟนั้นบอกอะไรไม่ได้มากไปกว่าเลนส์คู่นั้นลักษณะทางกายภาพเป็นอย่างไร ลักษณะทางกายภาพดี ก็ไม่ได้หมายความว่า เมื่อนำไปใส่บนหน้าแล้วจะได้ Optic ที่ดีตาม เช่นเดียวกับการทำเลสิกที่ต้องถ่ายพื้นผิวของกระจกตา เพื่อให้ Wavefront ทำการประเมินลักษณะของสายตาที่เกิดขึ้นกระจกตา แต่หมอไม่สามารถทำเลสิกด้วยการดูเพียงค่าจาก Topography เพียงอย่างเดียวแต่ต้องดูค่าสายตาจริงที่วัดได้จากห้องตรวจมาตรฐาน จึงจะสามารถทำเลสิกได้ถูกต้องและมีประสิทธิภาพ ดังนั้น Lens designer จะต้องออกแบบโครงสร้างเลนส์โดยใช้ Eye-model ของตามนุษย์จริงเมื่อมองผ่านเลนส์ที่มีค่าสายตาแล้วเกิดการทำมุมจากแว่นมีความโค้ง มีมุมเท และมีระยะห่างค่าหนึ่ง และเมื่อมองไปยังตำแหน่งต่างๆก็จะเกิดการเปลี่ยนแปลงของมุมตกกระทบระห่างเลนส์กับแนวการมอง ทำให้เกิดความคลาดเคลื่อนของค่าสายตา ซึ่ง Lens designer จะต้องคำนวณชดเชยมุมดังกล่าว แต่การใช้ Lensometer มา Map โครงสร้างโปรเกรสซีฟนั้น เป็นลักษณะ Wave ที่วิ่งผ่านเลนส์แบบตั้งฉาก ซึ่งไม่ใช่ลักษณะที่เกิดขึ้นจริง ดังนั้น Map ที่เกิดจากการใช้ Lensometer แบบ Wavefront นั้นไม่ได้มีประโยชน์อะไรในการนำไปใช้ทางคลินิก
Minkwitz’s Theorem
ทฤษฎีหนึ่งที่เกี่ยวข้องกับเลนส์โปรเกรสซีฟ ก็คือ ทฤษฎีของ Minkwitz ซึ่งอธิบายลักษณะหรือรูปแบบของสนามภาพบิดเบือนด้านข้าง ซึ่งเลนส์โปรเกรสซีฟที่มีการออกแบบที่ดีนั้นจะต้องออกแบบให้เลนส์มี Unwanted cylinder ด้านข้างที่ต่ำมากเท่าที่กฏทางฟิสิกส์และคณิตศาตร์จะไปได้ แต่อย่างไรก็ตามด้วยความที่เลนส์โปรเกรสซีฟคือ เลนส์ที่มี Unwated cylinder เป็นพื้นฐานในการออกแบบจากการหลอมชั้นเล็กๆที่เกิดจากการไล่ค่าความโค้งของค่าแอดดิชั่นให้หลอมรวมเป็นเนื้อเดียวกัน

Figure 7 : รูปแสดง Minkwitz's Theorem ซึ่งแสดงให้เห็นว่าการเพ่ิมขึ้นของ Unwanted cylinder ในแนวด้านข้างนั้นขึ้นเร็วเป็นสองเท่าของการเพิ่มขึ้นของค่าแอดดิชั่นที่เพิ่มขึ้นตามแนวคอริดอร์
ทฤษฎีของ Minkwitz’ แสดงให้เห็นว่า “อัตราการเพิ่มขึ้นของ Unwanted cylinder จากเซนเตอร์ออกไปด้านข้างตามแนวคอริดอร์นั้นคิดเป็น 2 เท่าของการเพิ่มขึ้นของค่า Addition ในแนวดิ่งตามแนวคอริดอร์” หรือคิดเป็นสูตรทางคณิตศาสตร์ได้เป็น

delta Add คือ “อัตราการเปลี่ยนแปลงเฉลี่ยของค่า Addition” ซึ่งมีค่าเท่ากับ “แอดดิชั่น/ความยาวคอริดอร์” นั่นหมายความว่า อัตราการเปลี่ยนแปลงของค่าแอดดิชั่นนั้นแปรผันตรงกับ“ค่าแอดดิชั่น”และแปรผกผันกับค่าความยาวของคอริดอร์ หมายความว่า ในคอริดอร์ที่เท่าๆกัน ยิ่ง add มีมากเท่าไหร่ อัตราการเปลี่ยนแปลงของค่าแอดดิชั่นก็จะเปลี่ยนแปลงเร็วมากเท่านั้น หรือ ถ้าให้ Add คงที่ ยิ่งเราให้คอริดอร์ยาวมากเท่าไหร่ ก็จะยิ่งทำให้การเปลี่ยนแปลงของค่าแอดดิชั่นน้อยลงเท่านั้น
ดังนั้น สิ่งที่สรุปได้จาก Minkwitz’s theorem คือ
1. อัตราการเพิ่มขึ้นของ Unwanted cylinder จากเซนเตอร์ไปทางด้านข้างของแนวคอริดอร์นั้น จะเพิ่มมากขึ้นเมื่อความยาวของคอริดอร์สั้นลง หมายความว่า ยิ่งเลนส์มีคอริดอร์สั้นมากเท่าไหร่ ก็จะยิ่งเกิด Distortion จาก Unwanted cylinder มากขึ้นเท่านั้นและยิ่งทำให้สนามภาพคมชัดที่ใช้งานได้นั้นแคบลง
2. อัตราการเพิ่มขึ้นของ Unwanted cylinder จากเซนเตอร์ไปทางด้านข้างของแนวคอริดอร์นั้น จะเพิ่มขึ้นตามค่าแอดดิชั่นที่เพิ่มขึ้น หมายความว่า อัตราการเพิ่มขึ้นของ Unwanted cylinder (Distortion) จะเพิ่มขึ้นในอัตราส่วนเดียวกันกับค่าแอดดิชั่นที่เพิ่มขึ้น (ยิ่งแอดดิชั่นมาก การบิดเบี้ยวของภาพก็จะยิ่งมากตาม ดังนั้น คนที่เริ่มใส่โปรเกรสซีฟเลนส์ตั้งแต่แอดดิชั่นยังน้อยๆ จะสามารถปรับตัวเข้ากับเลนส์โปรเกรสซีฟได้เร็วกว่าคนที่มาเริ่มใช้เอาตอนอายุมากๆแล้ว)

Figure 8 : แสดง Surface astigmatism ที่เกิดจาก Unwanted cylinder จากการออกแบบโครงสร้างโปรเกรสซีฟ ซึ่งความแรงของ Unwanted cylinder ที่เกิดขึ้น ณ ตำแหน่งเดียวกันของเลนส์ Add +3.00 นั้นแรงมากกว่า Add +1.00 ถึง 3 เท่า ดังนั้น ยิ่ง Add สูงมากเท่าไหร่ ยิิ่งทำให้โครงสร้างโปรเกรสซีฟแข็งและแคบลงเท่านั้น
การกระจายพื้นที่บิดเบี้ยวบนโครงสร้างโปรเกรสซีฟ (Distribution of surface optic)
สิ่งหนึ่งที่จัดว่าเป็นหลักพื้นฐานในการออกแบบเลนส์โปรเกรสซีฟ คือ การเกลี่ยหรือการกระจาย Unwanted cylinder และ Mean add power ของโครงสร้างโปรเกรสซีฟ ดังนั้น การกระจายขนาด รูปแบบ และอัตราการเปลี่ยนแปลงของ Unwanted cylinder และ Mean add power คือ หลักพื้นฐานสำคัญที่จะบอกได้ว่าเลนส์โปรเกรสซีฟแต่ละรุ่นนั้นมีประสิทธิภาพดีหรือไม่ ดังนั้น รูปแบบของการกระจาย Distortion หลักๆในอดีตนั้น มีอยู่ 2 รูปแบบ คือ “Hard Design” และ “Soft Design” โดยทั้ง 2 แบบนี้มีพื้นฐานการกระจาย Unwanted cylinder ที่แตกต่งกัน
Hard Design
Hard Design เป็นรูปแบบการออกแบบโดยมุ่งเน้นและให้ความสำคัญกับกับสนามภาพคมชัดสำหรับใช้งาน ที่ต้องการสนามภาพกว้างๆ ดังนั้น จะออกแบบโดยเกลี่ย Unwanted cylinder ให้ไปกองรวมกันอยู่ในพื้นที่แคบๆที่บริเวณด้านข้างทำให้ได้สนามภาพคมชัดในระยะไกลกับใกล้ที่กว้าง ในทางกลับกันก็จะต้องแลกกับภาพมัวและบิดเบี้ยวด้านข้างที่รุนแรง (โครงสร้างแข็ง) และภาพมีลักษณะความวูบวาบมาก ทำให้มีปัญหาในการปรับตัว
Soft Design
Soft Design นั้นมุ่งเน้นไปความนุ่มสบาย ภาพบิดเบี้ยวต่ำ ดังนั้น การออกแบบจะกระจายให้ Unwanted cylinder ค่อยๆมีการเพิ่มขึ้นทีละน้อย พูดอีกนัย ก็คือ กระจาย Unwanted cylinder บางส่วนลงไปบนสนามภาพส่วนที่ใช้งานโดยไม่กระจุกอยู่แค่ที่เดียวกัน ซึ่งการออกแบบเช่นนี้จะทำให้ภาพมัวหรือบิดเบี้ยวด้านข้างนั้นลดลง แต่จะมีสนามภาพที่คมชัดนั้นลดลงด้วยเช่นกัน
ดังนั้น ถ้าเราต้องการโครงสร้างโปรเกรสซีฟที่นุ่ม ภาพบิดเบี้ยวต่ำ เราสามารถทำได้โดยเพิ่มพื้นที่ในการกระจาย Unwanted cylinder ให้มากขึ้น (เหมือนเราจัดการกับบ่อขยะ เราสามารถทำให้กองพูนที่สูงตระหง่านของกองขยะให้เตี้ยลงโดยเพิ่มขนาดของบ่อขยะ) สำหรับเลนส์โปรเกรสซีฟก็สามารถทำได้โดยเพ่ิมพื้นที่ของ Blending area เราจะสามารถลดขนาดของ Unwanted cylinder ได้โดยการกระจายมันไปยังพื้นที่ต่างๆได้มากขึ้น ภาพบิดเบี้ยวก็จะน้อยลงตาม พร้อมกับพื้นที่คมชัดบนตัวเลนส์ที่ลดลงตามไปด้วย ทำให้บุคลิคเลนส์ Soft Design กับ Hard design มีความแตกต่างกัน โดย Hard design จะได้ในเรื่องของความคมชัด ในขณะที่ Soft design นั้นจะได้เรื่องของ Dynamic vision (Dynamic vision คือ การมองในลักษณะที่ดวงตามีการเคลื่อนที่ตลอดเวลา เช่น เล่นกีฬา ปั่นจักรยาน หรือออกกำลังกาย เป็นต้น) นอกจากนี้ Soft design ทำให้รู้สึกสบาย (Comfort) ปรับตัวได้ง่ายกว่า

Figure 9 : เป็น Astigmatism plot ระหว่างเลนส์ที่ใช้การดีไซน์แบบ Hard และ Soft design ซึ่งจะเห็นได้ว่าดีไซน์แบบ soft จะใช้พื้นที่ในการกระจาย Unwanted cylinder มากกว่า ทำให้ความ Peak ของ unwanted astigmatism ต่ำกว่า Hard design
เลนส์โปรเกรสซีฟสมัยใหม่ (Modern Progressive Lens)
โครงสร้างโปรเกรสซีฟที่ทันสมัยในปัจจุบันนี้ ไม่ค่อยมีแล้วที่จะเป็น Hard หรือ Soft design แบบจัดๆ แต่จะใช้โครงสร้างแบบ Balance ระหว่าง Soft และ Hard มากกว่า เพื่อให้ได้ประสิทธิภาพการใช้งานทั้งในเรื่อง Visual Acuity และ Dynamic Vision ซึ่งในการบาลานซ์โครงสร้างจะต้องมีการปรับแต่งให้เหมาะสมกับ Base curve หรือ ค่า Addition ที่แตกต่างกัน หรือ Lens designer อาจจะออกแบบโดยบูรณาการให้ประสิทธิภาพของเลนส์นั้นได้ประโยชน์จากทั้ง Soft และ Hard เช่น สำหรับพื้นที่มองไกลนั้นจะออกแบบใช้ Soft design เพื่อเน้นในเรื่อง Dynamic vision แต่มองใกล้นั้นใช้ดีไซน์แบบ Hard design เพื่อให้สนามภาพสำหรับอ่านหนังสือนั้นกว้างขึ้น ก็สามารถออกแบบได้เช่นกัน
การมองเห็นผ่านเลนส์โปรเกรสซีฟ (Vision and Progressive Lens)
การมองเห็นนั้นมีอยู่หลายรูปแบบ ซึ่งเลนส์โปรเกรสซีฟที่ดีนั้น ต้องสามารถ Serve ประสิทธิภาพเลนส์ให้ได้การมองเห็นครบทุกมิติ ได้แก่
-
Good critical vision
-
Good dynamic vision
-
Good binocular vision
-
Good ergonomic vision
การมองเห็นทั้ง 4 รูปแบบนี้ เป็นปัจจัยสำคัญและเกี่ยวข้องกันทั้งหมดในการที่จะออกแบบเลนส์โปรเกรสซีฟให้มีประสิทธิภาพสูงสุด และทั้ง 4 ปัจจัยนี้มีความเกี่ยวข้องกันทั้งหมด การที่เราไปเน้นการมองเห็นแบบใดแบบหนึ่งจะไปกระทบการมองเห็นอีกแบบหนึ่ง เช่น ถ้าเราจะเน้นที่ Dynamic vision โดยการทำโครงสร้างให้เป็น Soft design แบบสุดโต่งก็จะไปทำให้ความคมชัดของสนามภาพใช้งานในแต่ละระยะ (Critical vision) นั้นแคบลง หรือเมื่อเราต้องการออกแบบโดยมุ่งเน้นไปที่ Ergonomic Vision เช่นออกแบบให้ Corridor สั้นลงเพื่อช่วยในเรื่องการเหลือบตา สบายเวลาอ่านหนังสือ แต่การออกแบบเช่นนั้นก็จะทำให้สนามภาพคมชัดนั้นแคบลงด้วยเช่นกัน เนื่องจากการเพิ่มขึ้นของ Unwanted cylinder นั้นแปรผันตรงกับความยาวของคอริดอร์ ยิ่งคอริดอร์สั้นก็จะยิ่งทำให้การเพิ่มขึ้นของ Unwanted cylinder เพิ่มมากขึ้น สนามภาพจึงแคบลง
ดังนั้น Lens designer จะต้องมีการทำ Research and Development เพื่อหา Balance ที่ดีทีสุด ที่สามารถให้ Vision requirement ทั้ง 4 อย่างข้างต้นได้ครบทั้งหมดและให้ Performance ต่อผู้สวมใส่นั้นได้ดีที่สุด
การบาลานซ์โครงสร้างนั้นเป็นเรื่องที่ Lens designer ต้องพิจารณาเป็นสิ่งแรกเมื่อกำลังจะออกแบบเลนส์ ซึ่งต้องดูแบบองค์รวม จะมุ่งดูเฉพาะอย่างใดอย่างหนึ่งไม่ได้ เช่น ถ้าเราจะพิจารณาเพียงความกว้างของสนามภาพที่คมชัดเพียงอย่างเดียว โดยไม่สนใจเรื่อง Dynamic vision เลย มันอาจจะทำให้โครงสร้างที่ออกมานั้นยากที่จะนำไปใช้งานในชีวิตจริง เนื่องจากชีวิตจริงที่ต้องมีการเคลื่อนที่อยู่ตลอดเวลา เช่น ขับรถ วิ่งออกกำลังกาย ปั่นจักรยาน บางคนปีนเขา ขับมอเตอร์ไซต์
Critical vision
Critical vision เป็นการมองเห็น ที่เน้นความคมชัดและความกว้างของพื้นที่ใช้งานบนโปรเกรสซีฟในแต่ละโซนเป็นหลัก แต่ความคมชัดสูงสุดบนเลนส์โปรเกรสซีฟนั้นเกิดขึ้นได้ตามจุดศูนย์กลางการมองตามแนวคอร์ริดอร์เท่านั้น พอเลยจากแนวเซนเตอร์นี้แล้วก็จะเริ่มมีพื้นที่บิดเบี้ยวด้านข้างเกิดขึ้น ดังนั้น ขนาดของความกว้างของพื้นคมชัดตามแนวศูนย์กลางการมองนี้ ไม่สามารถแบ่งลงไปชัดเจนว่าจะกว้างได้เท่าไหร่ ดังนั้น ความกว้างของสนามภาพและประโยชน์ใช้สอยที่จะได้รับนั้น ขึ้นอยู่กับผู้สวมใส่ว่าจะมีความสามารถในการยอมรับ (Tolerance) กับภาพมัวได้มากน้อยแค่ไหน รวมพฤติกรรมของการใช้สายตาในการใช้งานต่างๆของผู้สวมใส่ด้วย
ขนาดของสนามภาพคมชัดนั้น สามารถทำให้เพิ่มขึ้นได้โดยการดัน Surface unwanted cylinder ให้ไปรวมอยู่ด้านข้าง หรือแหวกสนามภาพบิดเบี้ยวให้ห่างจากแนวของศูนย์กลางการมอง แต่การไปทำอย่างนั้น จะทำให้ให้ Unwanted cylinder นั้นเพิ่มขึ้นอย่างรวดเร็ว ทำให้เกิด Swimming effect แบบรุนแรง และเกิดปัญหาในการปรับตัว ดังนั้น Lens designer จะไม่ออกแบบสนามภาพคมชัดในระยะไกลและระยะใกล้ให้กว้างมากจนเกินความจำเป็น เพื่อหลีกเลี่ยงผลกระทบกับประสิทธิภาพของการมองเห็นในรูปแบบอื่น ท้ายสุด Lens desinger จะต้องพิจารณาจุดที่สมดุลที่สุดทั้งขนาดและพื้นที่คมชัดกับการมองเห็นในรูปแบบอื่นๆ เพื่อให้เลนส์นั้นมีความอเนกประสงค์มากที่สุด
ในการออกแบบสนามภาพคมชัดตามแนวคอริดอร์ (Central viewing zone) นั้นต้องคำนึงถึงสภาพแวดล้อมและธรรมชาติของงานนั้นๆ และลักษณะการใช้งานจริงของผู้ใช้งานได้แก่ ตำแหน่งที่ใช้มอง มุมของการเหลือบ ระยะที่ใช้มองหลัก เช่น คนที่ต้องทำงานหน้าคอมพิวเตอร์ทั้งวัน จะต้องการสนามภาพใช้งานในระยะกลางที่กว้างและอยู่ในตำแหน่งที่ไม่ต้องเงยหน้ามากนักและมีความเสถียรภาพ สามารถกวาดตาผ่านเลนส์ตามแนว Central viewing zone ได้โดยไม่ต้องก้มๆเงยๆเพื่อหาโฟกัส นอกจากรูปทรงของวัตถุที่มองก็เป็นปัจจัยที่สำคัญเช่นกัน ดังนั้น ในการออกแบครงสร้างหรือการวางตำแหน่งใช้งานและตำแหน่งของแอดดิชั่น จะต้องให้สอดคล้องกับการใช้งานในชีวิตจริง และที่สำคัญตำแหน่งของ Full addition ที่ไว้สำหรับอ่านหนังสือ ต้องวางให้ตรงและเหมาะสมกับตำแหน่งอ่านหนังสือปกติ ไม่ให้อยู่ต่ำจนต้องใช้งานผิดธรรมชาติจนเกินไป

Figure 10 : Lens designer จะต้อง Balance ขนาดของสนามภาพใช้งานทั้งสามระยะ คือ ไกล กลาง ใกล้ ให้เหมาะสมกับการใช้งานในชีิวิตประจำวันมากที่สุด เพื่อให้ผู้ส่วมใส่นั้นสามารถปรับตัวกับโครงสร้างได้ง่าย และใช้งานในชีิวิตประจำวันได้อย่างไม่มีปัญหา
แต่ก็ต้องไม่ลืมว่า การที่เราแหวกสนามภาพที่ระยะหนึ่ง จะไปกระทบการใช้ของระยะอื่น และไม่ว่าอย่างไรตำแหน่งมองตรงผ่านเลนส์ (Distant reference point, DF) จะเป็นตำแหน่งสำหรับมองไกลเสมอ นั่นหมายความว่า ผู้ที่สวมใส่โปรเกรสซีฟ จะต้องเงยหน้าเล็กน้อยเมื่อให้สามารถมอง PC ชัดที่ระยะ 80 ซม. เพราะระยะกลางนั้นอยู่ต่ำกว่า DF พูดอีกนัยหนึ่ง คือ ผู้สวมใส่ไม่สามารถมองตรงแล้วเห็นคอมพิวเตอร์คมชัดเมื่อใช้เลนส์โปรเกรสซีฟแบบอเนกประสงค์ จึงต้องมีเลนส์โปรเกรสซีฟเฉพาะทางขึ้นมาสำหรับการใช้งานที่เฉพาะ เช่น Computer lens เป็นต้น ซึ่งมี Range อยู่ในช่วง 35 ซม. ถึง 1.50 ซม. อาจจะไกลว่านั้น ถ้าหากค่า Add ยังไม่มากนัก ซึ่งเลนส์โปรเกรสซีฟประเภทนี้สามารถใช้งานมองตรงแล้วเจอคอมพิวเตอร์กว้างกว่าโปรเกรสซีฟ ไม่ต้องเงยหน้า มี Ideal working distant อยู่ที่ 80 ซม. และมองเลยจอไปได้ประมาณ 80 ซม. มองตรงและเหลือบตาลง 15-20 องศาโดยไม่มีการเปลี่ยนแปลงของความคมชัด มีการวางตำแหน่งใช้งานที่เหมาะสมกับลักษณะการทำงานหน้าพีซีจึง ไม่ต้องก้มๆเงยๆ หรือคอยหันซ้ายหันขวา
Dynamic Vision
ภาพมัวที่ด้านข้างที่เกิดจาก Unwanted cylinder ของเลนส์โปรเกรสซีฟนั้น ไม่ส่งผลกระทบกับการมองแบบ Dynamic vision สักเท่าไหร่ แต่อย่างไรก็ตาม โครงสร้างโปรเกรสซีฟที่ออกแบบให้มีการ Progressive ของค่าแอดดิชั่นจากบนลงล่าง (ในแนวแกน y) และ Unwanted cylinder ที่เพิ่มขึ้นในแนวซ้ายขวา (ในแนวแกน x) จะทำให้เกิดการเปลี่ยนแปลงของกำลังปริซึม (Prism) และ กำลังขยาย (Magnification) อย่างรวดเร็ว ทำให้เกิดผลกระทบกับผู้ที่ใช้งานที่รู้จักกันก็คือ เกิด “Image swim” ใส่แล้วภาพโคลงเคลงเหมือนเดินอยู่บนเรือ หรือภาพเคลื่อนจากตำแหน่งได้ (Image shift) หรือ ภาพบิดเบี้ยว (Distort) หรือเห็นภาพเอียงๆ แกว่งไปมา ผลคือ เมาโปรเกรสซีฟ ซึ่งอาการคล้ายๆกับการเมารถ
Vestibular apparatus เป็นอวัยวะที่อยู่ในหูชั้นในซึ่งเชื่อมต่อกับระบบประสาทการมองเห็น ซึ่งระบบ Vestibulo-ocular จะช่วยให้เกิดการเสถียรภาพและการทรงตัว ช่วยให้ส่งสัญญาณให้เราสามารถรู้ตำแหน่งที่เรากำลังดำรงอยู่ เช่น เวลาเราหลับตาแล้วนั่งอยู่บนรถที่กำลังวิ่งไปตามเส้นทางบนภูเขาที่คดเคี้ยวเราก็รู้ว่าเรากำลังอยู่ในลักษณะแบบไหน ก้มหน้า เอียงตัว เอนซ้าย เอนขวา หรือเอาหัวลง เราก็สามารถรู้โดยที่ไม่ต้องลืมตามอง ทำให้เวลาเราเคลื่อนที่นั้นเราจะรู้สึกถึงความเสถียรภาพของร่างกาย แต่เมื่อเราใส่โปรเกรสซีฟแล้วเดิน ภาพมัวและบิดเบี้ยวด้านที่เข้ามากวนจากพื้นที่ด้านข้าง จะทำให้ภาพด้านข้างที่เรามองนั้นมีการเคล่ื่อนที่ (Image swim) ในขณะที่เราเคลื่อนที่ร่างกายน้ำในหูจะรับรู้อีกแบบหนึ่ง แต่ตาเราเห็นโลกมีการเคลื่อนที่อีกแบบหนึ่ง ทำให้เกิดความขัดแย้งกันของระบบ Vestibulo-ocular ผลคือ เรามีอาการไม่สบายท้อง คล้ายๆอาการเมารถ (Motion sickness) นั่นเอง

Figure 11 : การทำงานร่วมกันของระบบ Vestibulo-ocular ที่ช่วยในเรื่องการทรงตัว ซึ่งเป็นการทำงานร่วมกันของระดับน้ำในหูชั้นในและดวงตา
วัตถุ “เส้นตรง” จะมองเห็นเป็นเส้นโค้ง หรือ เบี้ยว เมื่อมองผ่านบริเวณด้านข้างของเลนส์ เนื่องจาก Unwanted cylinder ที่บริเวณด้านข้างนั้นมีการวางตัวของกำลังสายตาเอียงอยู่ในแนวเฉียง (Oblique) และกำลังของสายตาเอียงนั้นไม่คงที่ มีการเพิ่มขึ้นตลอดเวลาจากศูนย์กลางไปด้านข้าง และรูปแบบของกำลังขยายนันเพิ่มขึ้นในแนวเฉียงตามแนว Unwaned cylinder ด้วย จึงทำให้ภาพที่มองเห็นผ่านด้านข้างเลนส์นั้น ทำให้เส้นตรงที่วางตัวในแนวดิ่งหรือแนวนอนนั้นดูเอียงๆยืดๆ เรียกภาพลักษณะนี้ว่า Skew distortion

Figure 12 : กำลังขยายที่เกิดขึ้นในแนวด้านข้างจากการเพิ่มขึ้นของ unwanted oblique cylinder ในแนวเฉียงนั้นทำให้เกิดภาพมีลักษณะของการบิดเบี้ยว
ดังนั้น การออกแบบ Optic surface บริเวณด้านข้างนั้นควรจัดการอย่างระมัดระวังเพื่อลด Image swim, Skew distortion และ Unwanted optical error อื่นๆ ซึ่งเป็นสาเหตุทำให้เรารู้สึกว่าวัตถุมีการเคลื่อนที่แบบมีอัตราเร่งกว่าความเป็นจริง ซึ่งการควบคุมนี้ทำได้โดยควบคุมอัตราการเปลี่ยนแปลงของกำลังปริซึมและกำลังของ Unwanted cylinder เช่น Skew distortion สามารถลดได้โดยควบคุมแกนของ Unwanted astigmatism ที่บริเวณด้านข้างซึ่งวางตัวในแนวเฉียง ให้ลดความเฉียงลงก็จะสามารถช่วยได้
Binocular Vision
ในการออกแบบเลนส์โปรเกรสซีฟในอดีตนั้น ดีไซน์จะเป็นแบบสมมาตร (Symmetrical Design) หมายความว่า โครงร้างของเลนส์ข้างซ้ายและข้างขวานั้นหน้าตาเหมือนกัน ทำให้เกิดปัญหาเวลาดูใกล้ เนื่องจากขณะที่ตามีการเหลือบเข้า ทำให้ตำแหน่งตาขณะเหลือบนั้นไม่อยู่ที่บริเวณตรงกลางโซนใช้งาน (เนื่องจากคอริดอร์นั้นไม่มีการเยื้องของ Inset) ดังนั้นในการแก้ไขเลนส์ในอดีตจะใช้การบิดเลนส์ออก 9-10 องศา ซึ่งเป็นการทำเพื่อให้เกิด Inset ให้สอดคล้องกับการเหลือบ ทำให้การเหลือบนั้นอยู่ในแนวตรงกลางโซน
แต่การทำเช่นนั้นจะทำให้ Unwanted oblique cylinder ยกตัวสูงขึ้นในด้านจมูก ทำให้เกิดปัญหาใหญ่ตามมา คือ ภาพบิดเบี้ยวจะไปกวนระบบ Binocular fusion ทำให้การทำงานร่วมกันของสองตานั้นรวมภาพลำบาก โดยเฉพาะอย่างยิ่งเมื่อผู้ใส่เหลือบตาในแนวซ้ายขวา นอกจากนี้ยังไปทำให้ขนาดของสนามภาพเมื่อมองพร้อมกันด้วยสองตา (Binocular field of view) ลดลงและการออกแบบเลนส์ในสมัยก่อนนั้น ยังถูกจำกัดด้วยเรื่องของ Inset คือ Inset จะถูกวางในแนวเส้นตรงแนวดิ่ง ซึ่งไม่สอดคล้องกับการใช้สายตาจริงๆ

Figure 13 : โครงสร้างแบบ Symetrical Design ทำให้ Visual field ลดลงจากการ ต้องบิดหรือหมุนเลนส์เพื่อให้เกิด inset แต่การได้มาซึ่ง inset จะแลกมากับ distortion ทางด้าน nasal ที่เพิ่มขึ้น ทำให้เกิดปัญหาในการรวมภาพ ผลคือ โครงสร้างโปรเกรสซีฟจะแคบลง
เลนส์โปรเกรสซีฟเทคโนโลยีใหม่นี้ จะออกแบบใหม่เป็น Asymmetrical Design โดยออกแบบข้างซ้ายและข้างขวาแยกอิสระจากกัน การจัดการกับ Power cylinder ในแต่ละด้านของแนว Corridor ของเลนส์แต่ละข้างออกแบบอิสระจากกัน ทำให้สามารถออกแบบการเยื้องของ Inset ให้สอดคล้องกับการเหลือบโดยที่ไม่ต้องหมุนเลนส์ และการออกแบบ Progressive corridor จะไม่วิ่งเป็นเส้นตรงเหมือนเลนส์ในอดีต แต่มีการเยื้องเข้าหาจมูกตามลักษณะของการเหลือบแต่ละคน ซึ่งจะเยื้องเท่าไหร่นั้น ก็มีหลายตัวแปรที่ต้องนำไปคิดเฉพาะบุคคล คือ ขนาดของPDของตาแต่ละข้าง (Monocular pd) ค่าสายตา (สั้น, ยาว) ค่าแอดดิชั่น (Addition) และระยะที่อ่านหนังสือ (Reading distant) ซึ่งเลนส์โทคโนโลยีใหม่นี้ทำให้ Inset สอดคล้องกับการเหลือบมากขึ้น แนวของการมองของตาซ้ายและตาขวาเกาะ Central field of view ตามแนวคอริดอร์ได้ดีขึ้น ทำให้ Binocular field of view กว้างขึ้น

Figure 13 : การดีไซน์แบบ Asymmetrical Design ที่แยกการดีไซน์เลนส์ข้างซ้ายและข้างขวาออกจากกันนั้น ทำให้เกิด Inset ขึ้นโดยไม่ต้องหมุนเลนส์ ซึ่งทำให้ได้การมองแบบ Binocular vision ซึ่งช่วยคงความคมชัดของภาพคงที่เมื่อเหลือบไปทางซ้ายหรือทางขวา และได้สนามภาพใช้งานได้เต็มที่
แต่การพยายามกด Unwanted cylinder ที่บริเวณทางด้านจมูก (Nasal) เพื่อให้ได้ Binocular field of view ที่กว้างขึ้น โดยไม่ต้องบิดเลนส์เพื่อเอา Inset แต่สิ่งที่จะเกิดขึ้นตามมา คือ เกิด Unwanted cylinder ที่บริเวณฝั่งทางจมูกจากแนวคอริดอร์ (Nasal side to progressive corridor) นั้นเพิ่มมากขึ้นมากกว่าในแนวด้านฝั่งหู (Temporal side) ผลก็คือ ขนาดปริซึม กำลังขยาย กำลังหักเห ของจุดคู่สมบนตัวเลนส์ (Corresponding point) เมื่อตามองผ่านเลนส์ไปยังตำแหน่งต่างๆนั้น มีค่าไม่เท่ากัน ทำให้มีปัญหาการรวมภาพลำบาก ใช้งานยาก และไม่สบายตา
ดังนั้น Lens designer จะต้องออกแบบใหม่เรียกว่า Horizontal Symmetry ซึ่งเป็นสเตปที่แอดวานซ์ขึ้นไปอีกขั้นของ Asymmetircal Design คือ optimized จุดคู่สมบนตัวเลนส์เมื่อตามองผ่านไปยังตำแหน่งต่างๆพร้อมๆกัน ให้มีกำลังหักเหกำลังปริซึมใกล้เคียงกัน เพื่อให้ตาสามารถทำงานแบบ Synchronized กันได้สมบูรณ์

Figure 14 : การดีไซน์เลนส์แบบ Horizontal Symmetry จะช่วยให้จุดคู่สมบนตัวเลนส์ที่ตาทั้งคู่จะมองผ่านเวลามองไปยังตำแหน่งด้วยกันนั้น มีกำลังค่าสายตา กำลังปริซึม และกำลังขยายเท่าๆกันทั้งสองฝั่งของแนวคอริดอร์ ทำให้การรวมภาพจากทั้งสองตาทำได้ดีขึ้น มี Binocular fusion ดีขึ้น comfort มากขึ้น
Ergonomic Vision
ในทางทฤษฎีนั้น ความยาวของคอริดอร์ (Progressive corridor length) นั้นคือ ช่วงหรือระยะที่ใช้แบ่งระหว่างจุดที่ค่า Add น้อยที่สุด และ จุดที่ add มากที่สุด คือจุดที่ต่ำกว่าตำแหน่งมองไกล (Distant reference point) และจุดที่อยู่สูงกว่าตำแหน่งอ่านหนังสือ (Near reference point) แต่ในทางคลินิกหรือการนำไปใช้ คอริดอร์นั้นวัดจากจุด Fitting point ไปจนถึงขอบบนของวงอ่านหนังสือ ซึ่งมีค่าอยู่ที่ 85% ของค่า Addition)
ในการเลือกคอริดอร์นั้นมีสิ่งที่ต้องพิจารณาก็คือว่า ความสั้น, ยาว ของคอริดอร์นั้นส่งผลต่อทั้งความแคบกว้างของโครงสร้าง และเรื่องของตำแหน่งใช้งานบนตัวเลนส์ เช่น ถ้าเราเลือกโครงสร้างที่มีคอริดอร์ที่สั้น ประโยชน์ที่จะได้รับ คือ
1. มีพื้นที่ใช้งานอ่านหนังสือได้กว้างเต็มพื้นที่แม้จะใส่ในกรอบเล็กๆ
2. ไม่ต้องเหลือบตาลงต่ำมากเวลาอ่านหนังสือ
เนื่องจาก ทุกๆความยาวของคอริดอร์ 1 มม.ที่เพิ่มขึ้น จะทำให้เราต้องเหลือบลงต่ำมากขึ้น 2 องศาโดยประมาณเพื่อที่จะอ่านหนังสือให้คมชัด ดังนั้น ถ้าคอริดอร์ยาวเกินไป จะทำให้การเหลือบตาอ่านหนังสือนั้นต้องเหลือบมาก และทำให้ไม่สบายเนื่องจากสรีระไม่ได้อยู่ในตำแหน่งธรรมชาติอย่างที่ควรจะเป็น คอริดอร์ที่ยาวเกินไปอาจจะไม่พอกับ Minimum fitting hight เมื่อผู้ใส่เลือกกรอบขนาดเล็ก
แต่อย่างไรก็ตาม การเลือกคอริดอร์ที่สั้นนั้น ก็มีข้อเสียได้แก่
1. ระยะกลางแคบ ใช้งานคอมพิวเตอร์ยาก เพราะคอริดอร์ที่สั้นจะทำให้เกิดการเปลี่ยน Power ที่เร็ว ทำให้โฟกัสระยะกลางนั้นเปลี่ยนแปลงเร็ว ไม่เสถียร ทำให้ต้องก้มๆ เงยๆ เมื่อทำงานบนจอขนาดใหญ่
2. ระดับการเพิ่มขึ้นของ Unwanted cylinder และ Distortion เพิ่มขึ้นอย่างรวดเร็ว ทำให้เกิดภาพวูบวาบเวลาใช้งาน ปรับตัวยากกว่า
ดังนั้น ในการเลือกโครงสร้างโปรเกรสซีฟ หรือเลือกความยาวของคอริดอร์นั้น จะต้องเลือกอย่างระมัดระวัง เพื่อให้ลักษณะของโครงสร้างนั้นเหมาะสมกับผู้ใช้งานแต่ละคน นอกจากนี้แล้ว อัตราการเปลี่ยนแปลงของค่าแอดดิชั่นตามแนวคอริดอร์นั่นก็สำคัญ การเพิ่มขึ้นของค่าแอดดิชั่นอย่างรวดเร็วบริเวณตำแหน่ง fitting cross ก็เป็นเหตุให้มองไกลมัวได้เช่นกัน และการเร่งค่า Add ให้ถึง Reading zone ก็ควรออกแบบโดยคำนึงว่าคนใช้งานจริงนั้นอ่านหนังสืออย่างไร จึงจะสามารถออกแบบโครงสร้างให้เหมาะกับผู้ใช้งานจริงๆ

Figure 15 : ในการออกแบบการเปลี่ยนแปลงของ Progressive power นั้นจะต้องควบคุมอย่างระมัดระวัง เพื่อให้กำลังที่ตำแหน่งต่างๆตามแนวของคอริดอร์นั้นสอดคล้องกับลักษณะการใช้งานในชีวิตจริง โดยไม่ทำให้ทำให้ประสิทธิภาพด้านอื่นๆลดลง
สรุปได้ว่า
เลนส์โปรเกรสซีฟนั้นเป็นเลนส์ Multi-focal ชนิดหนึ่ง ซึ่งต่างจากเลนส์ชนิดอื่น คือ “มีหลายชั้นแต่ไร้รอยต่อ” ทำให้สามารถใช้งานได้อเนกประสงค์ทั้งระยะไกล กลาง และใกล้ ซึ่งการออกแบบให้ไร้รอยต่อนั้นใช้การขัด Unwanted cylinder ในแนว Oblique ทำให้เกิด Unwanted obliqe astigmatism เกิดขึ้น ซึ่งผลก็คือ ทำให้เกิดภาพบิดเบี้ยว (Distortion) ภาพมัว (Blur) และภาพมีอัตราเร่ง (Accelerated image) ซึ่งเกิดจากกำลังขยายของเลนส์ในแต่ละจุดที่ต่างกันจาก Unwanted cylinder power และ Prism power ที่ต่างกัน
ดังนั้น เลนส์โปรเกรสซีฟเกิดขึ้นจากพื้นฐานของการขัด Unwanted cylinder เข้าไป นั่นแปลว่ามันเกิดมาพร้อมกับภาพบิดเบี้ยวด้านข้าง ซึ่งจะมากจะน้อยนั้นก็ขึ้นอยู่กับเทคโนโลยีและการออกแบบของทีมผู้ผลิตเลนส์
ทฤษฎีของ Minkwitz บอกเราว่า
1. Unwanted cylinder power นั้นแปรผกผันกับความยาวคอริดอร์ นั่นหมายความว่า เลนส์ที่มีคอริดอร์สั้นมากเท่าไหร่ ก็จะยิ่งเกิด Distortion จาก Unwanted cylinder มากขึ้นเท่านั้น ในทางกลับกันเลนส์ที่คอริดอร์ยาวกว่าก็จะลด Unwanted cylinder ได้มากกว่าเช่นกัน
2.อัตราการเพิ่มขึ้นของ Unwanted cylinder จะเพิ่มขึ้นตามค่าแอดดิชั่นที่เพิ่มขึ้น หมายความว่า ยิ่ง Add มากขึ้นเท่าไหร่ ก็จะยิ่งมี Unwanted cylinder มากขึ้นเท่านั้น
ดังนั้น คนที่เริ่มใส่โปรเกรสซีฟเลนส์ ตั้งแต่แอดดิชั่นยังน้อยๆจะสามารถปรับตัวเข้ากับเลนส์โปรเกรสซีฟได้เร็วกว่าคนที่มาเริ่มใช้เอาตอนอายุมากๆแล้ว
และในการออกแบบโครงสร้างเลนส์นั้น มีเรื่องให้ต้องคิดอยู่หลายเรื่อง เพื่อให้การมองเห็นผ่านเลนส์โปรเรกสซีฟนั้นดีที่สุด แต่เนื่องจากการมองเห็นนั้นมีอยู่หลายรูปแบบ เช่น Critical vision, Binocular vision, Dynamic Vision และ Ergonomic Vision และการออกแบบเลนส์จึงไม่สามารถมุ่งไปที่ด้านใดด้านหนึ่งเพียงอย่างเดียวและการโฟกัสการมองเห็นอย่างหนึ่งจะไปกระทบการมองเห็นอีกอย่างหนึ่ง ดังนั้น เลนส์โปรเกรสซีฟแต่ละแบรนด์ที่มีความแตกต่างกันนั้น ขึ้นอยู่กับความสามารถในการบาลานซ์ให้การมองเห็นทุกรูปแบบนั้นทำออกมาได้ดีที่สุด
ซึ่งเทคโนโลยีล่าสุดของโปรเกรสซีฟนั้น ผู้ใช้สามารถออกแบบมุมมองโครงสร้างที่ต้องการได้เอง ให้สอดคล้องกับการใช้งานได้ ว่าจะให้น้ำหนักไปที่การมองเห็นแบบใดเป็นสำคัญ ตัวอย่างเลนส์ที่ว่านั้น ก็คือ Impression FreeSign3 ของ Rodenstock ที่มี Option ให้ผู้สวมใส่นั้นเป็นคนบอกจุดประสงค์การใช้งาน โดยให้น้ำหนักในแต่ละกิจกรรมที่เกิดขึ้นประจำวัน เพื่อผู้ผลิตจะสามารถออกแบบโครงสร้างให้สอดคล้องกับความต้องการของผู้ใช้งานได้
ทั้งนี้ทั้งนั้น ส่ิงที่ผู้ผลิตสามารถควบคุมได้ ก็คือ Lens design และ Lens Manufacturing ในการที่จะชดเชยตัวแปรต่างที่จะส่งผลกระทบกับโครงสร้างเลนส์ให้ได้เลนส์ที่มีโครงสร้างที่ดีที่สุด แต่สิ่งที่ผู้ผลิตควบคุมไม่ได้ คือ ความถูกต้องของค่าสายตา, ความถูกต้องของการวางตำแหน่งฟิตติ้ง, ความถูกต้องของการฝนประกอบเลนส์ให้ได้เซนเตอร์, ความถูกต้องของการเลือกโครงสร้างให้เหมาะกับการใช้ชีิวิตของแต่ละคน, ความถูกต้องของการดัดแว่นให้ได้มุมที่ถูกต้องตามเลนส์แต่ละรุ่น, ความถูกต้องของการวัดค่าพารามิเตอร์ของกรอบแว่น ซึ่งปัจจัยเหล่านี้ก็มีความสำคัญที่จะทำให้โครงสร้างโปรเกรสซีฟนั้นเมื่อทำออกมาแล้วนั้น ใส่ดีหรือไม่ดี ไม่ใช่เพียงแค่ว่า จ่ายเลนส์แพงๆแล้วจะดีเสมอไป ก็อยากจะฝากเอาไว้
เอาหล่ะพอสมควรแก่เวลา หวังว่าผู้ท่านทุกท่านที่สนใจ คงจะได้รับประโยชน์จากบทความเรื่องนี้ ไม่มากก็น้อย หากมีข้อสงสัยประการใด โทรมาสอบถามโดยตรงได้ที่เบอร์ติดต่อ 0905536554

ขอบพระคุณครับ
Dr.Somyot Phengtavee ,O.D. (optometrist)
Reference :
Sorce : Fundamental of Progressive lens by Darry Meister
-
Schwendeman, F, Ogden, B, Horner, D, & Thibos, L. “Effect of Sphero-Cylinder Blur on Visual Acuity.” Optometry and Vision Science, 1997; Vol. 74, No. 12; pp 180-181
-
Sheedy, J, Campbell, C, King-Smith, E, and Hayes, J. “Progressive Powered Lenses: the Minkwitz Theorem.” Optometry and Vision Science, 2005; Vol. 82, No. 10, pp 1-9
-
Sheedy, J, Hardy, R, & Hayes, J. “Progressive addition lenses – measurements and ratings.” Optometry, 2006; Vol. 77, pp 34-36
